Shivendra Agrawal

University of Colorado
Boulder, Colorado
About myself: CS Ph.D. (CU Boulder ‘26) developing deployable, context-aware robotics and human-centered AI at the intersection of Robotics, HRI, and Vision-Language Models. Proven track record of top-tier publications (RA-L, IROS, HRI, AAMAS, ICRA) and award-winning instructional excellence with multiple Outstanding TA and Instructor awards.
Other interests: I enjoy playing tennis a lot (like a lot!!). On good sunny days, I also like to bike and run in the lovely city of Boulder. (Bonus) Boulder Creek Path Fall view through my bike. I also like to explore local food and beverages.
Minor-flex - I have more than 60 millions views on my Google Map contributions and have received a rather vibrant pair of socks from Google. And no, that was all I ever got from them.
Summary of some of my work:
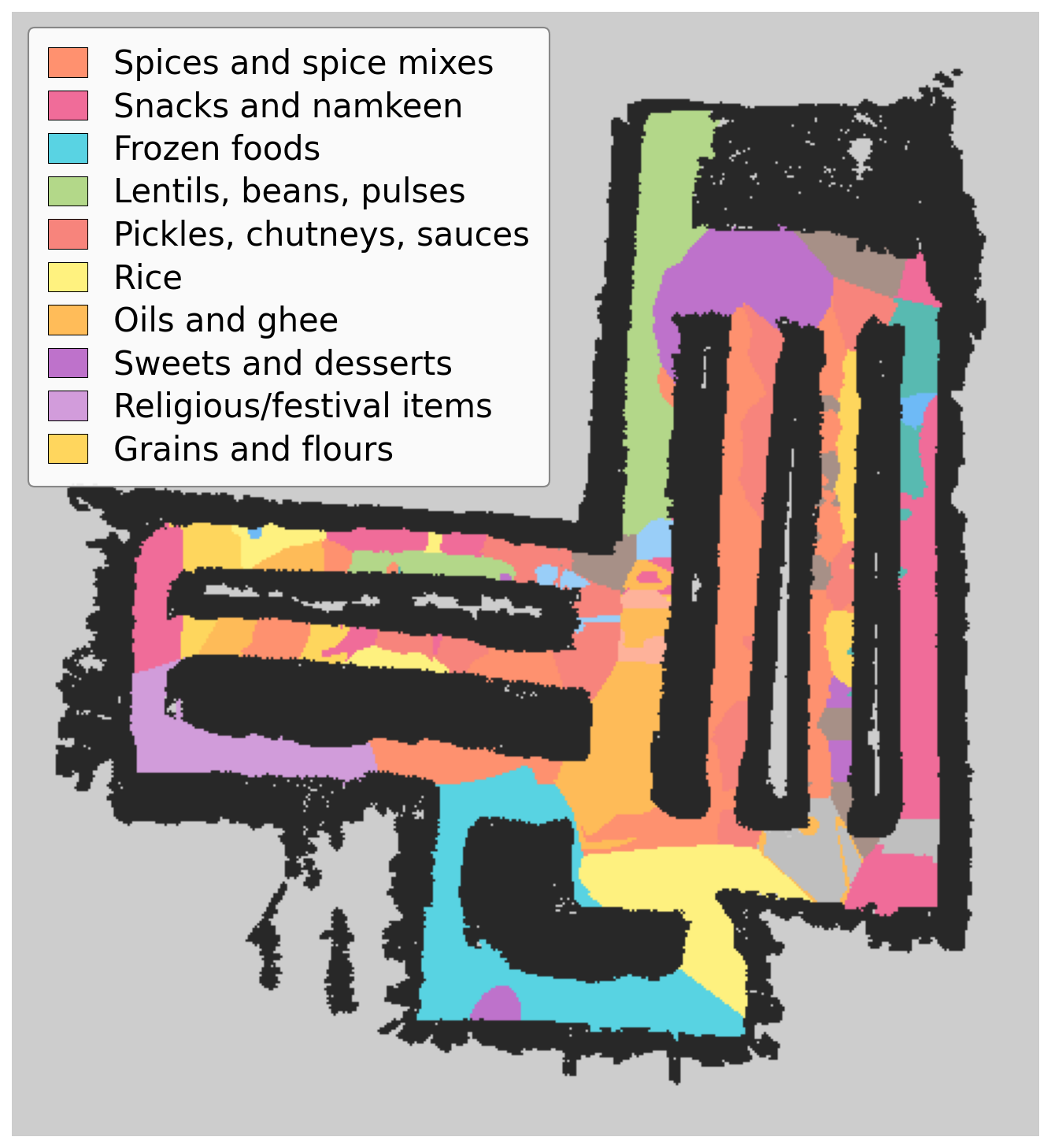
Multimodal Knowledge Extraction and Spatial Grounding (In Submission): A multimodal pipeline that transforms mobile LiDAR scans into a lightweight semantic topology, enhancing spatial grounding for VLMs and enabling intent-aware search, one-shot global localization, and visually grounded language-based navigation. Project page
Robust Semantic Localization (RA-L): A Semantic Particle Filter leveraging RGB-D and Visual-Inertial Odometry (VIO) to achieve state-of-the-art global localization accuracy in quasi-static, cluttered environments without external infrastructure. Project page
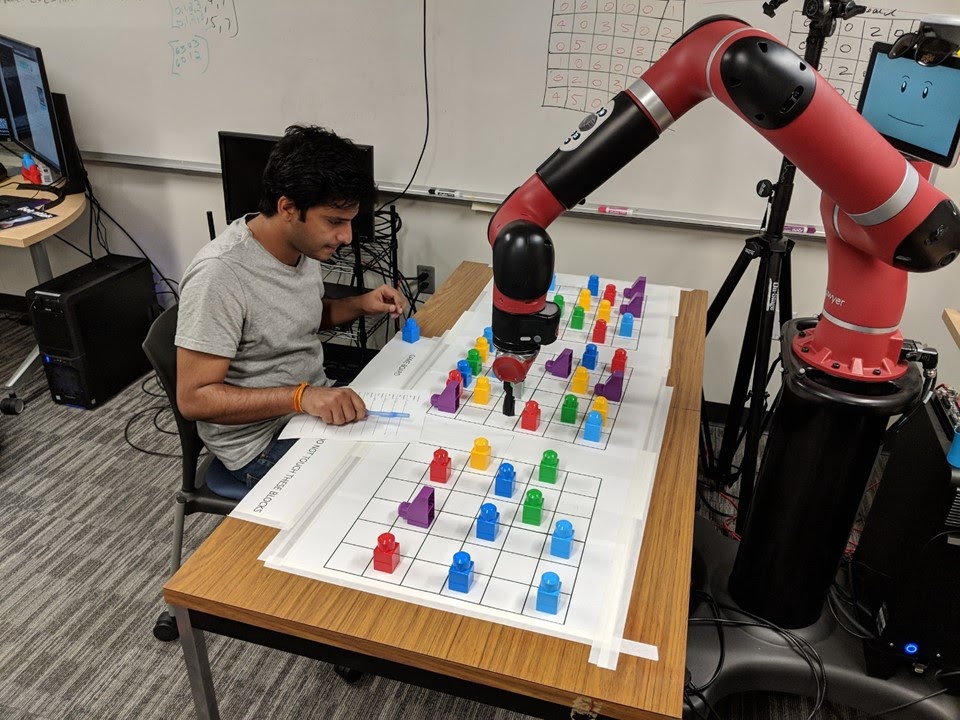
Learning Decision-Making Policies from Human Behavior (AAMAS): Learning an optimal guidance policy from human behavioral data to provide grasping guidance (featured in national media). Project page
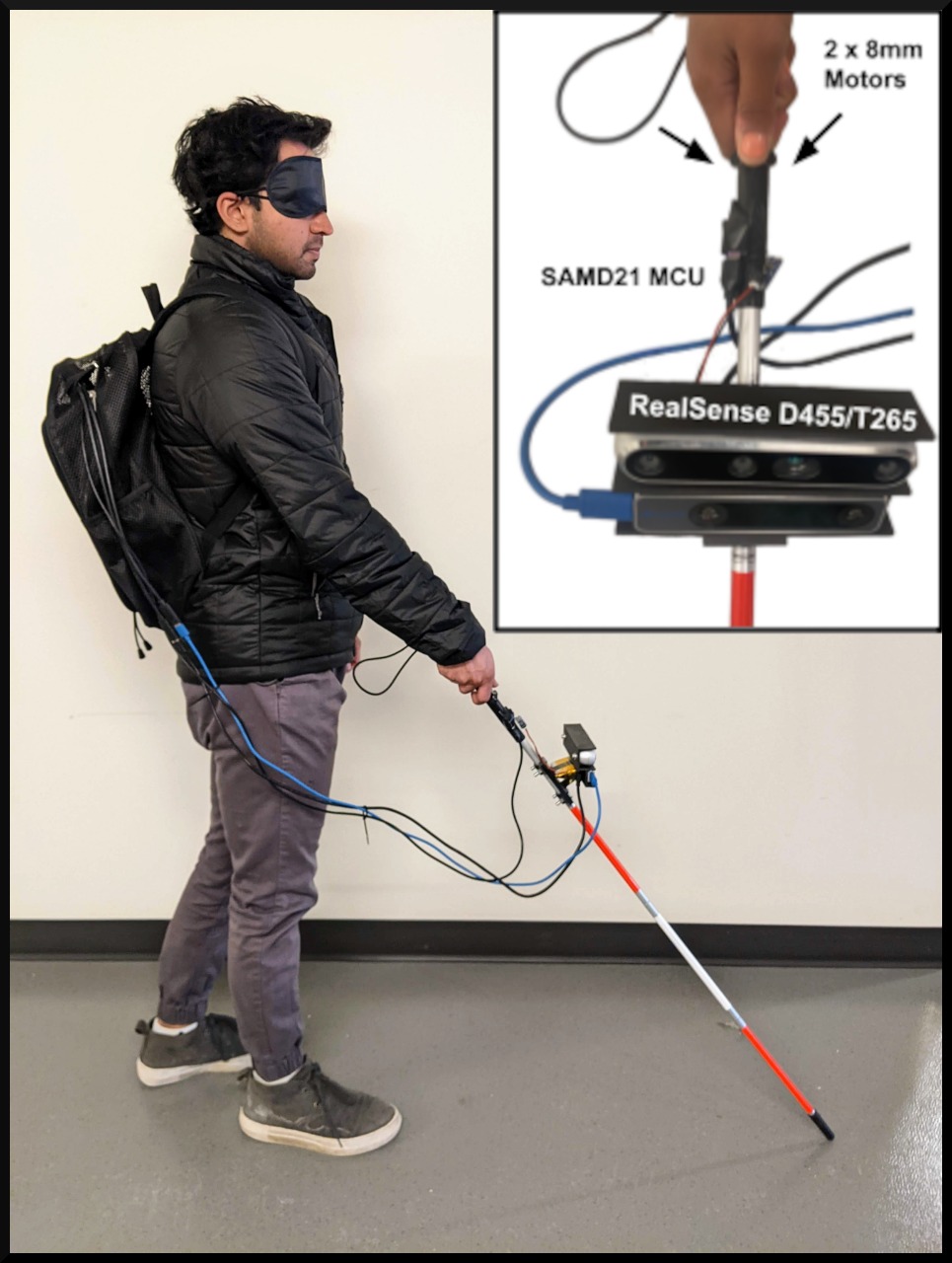
Designing Embodied AI for Social Context (IROS): A perceptive robotic cane that used models from psychology to identify socially appropriate seating locations (optimizing for privacy and intimacy). Project page
Explainable Robotic Coaching (HRI): A framework for a robot to infer a human partner's likely mental model by observing suboptimal actions to provide targeted coaching with justifications (HRI '19 Best Paper Runner-up). Project page
news
| Jul 2026 | Successfully defended my Ph.D. thesis! |
|---|---|
| Jun 2026 | Research talk at Yale University, New Haven |
| Jun 2026 | Invited talk at NIST |
| May 2026 | Workshop Paper Accepted at ICRA 2026 SRRA! |
| Apr 2026 | RA-L Paper Accepted! |
| Mar 2026 | Won the Dissertation Completion Fellowship 2026 |
| Feb 2026 | Guest lecture on Hidden Markov Models in the Intro to AI class at CU Boulder |
| Feb 2026 | Awarded Best Poster at the Annual Research Expo 2026 CU Boulder |
| Jan 2026 | Invited research talk at Fairfield University |
| Jan 2026 | Selected as the Next Gen Cohort for CERAWeek 2026 (Could not attend due to unavoidable circumstances) |